|
Bobby(Zhuoran) Peng I am a incoming PhD student in the Department of Computer Sciences at the University of Wisconsin-Madison. I completed my CS & Math degree at New York University's CILVR Lab, where I am fortunately advised by Prof Lerrel Pinto. My interest lies on Robot learning, particularly lifelong learning, multitask learning, and World Models. In my spare time I cook, eat, play tennis, and watch anime. |
|
Research |

|
PROTIP - Points and Reasoning Orchestration: Tools for Integrated
Policies
Zhuoran Peng, Raunaq Bhirangi, Lerrel Pinto, Siddhant Haldar ICRA, 2026, under review project page / arXiv A multi-agent orchestration system for high-level planning with vision models and low-level point-based control. |
|
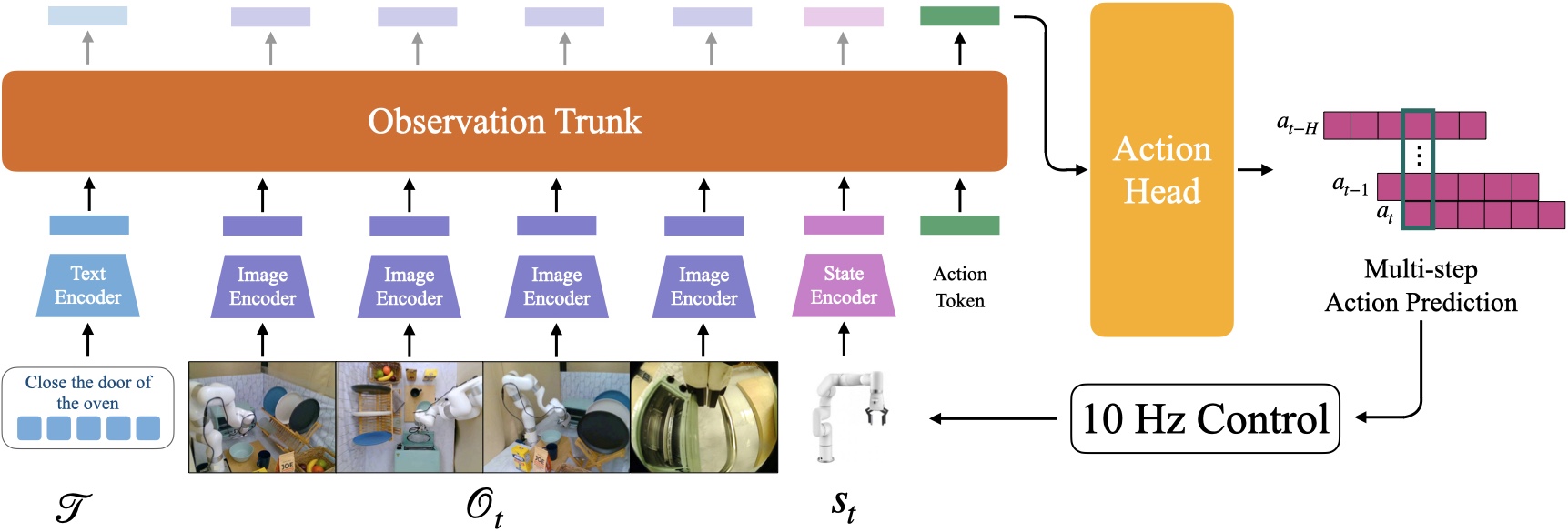
BAKU: An Efficient Transformer for Multi-Task Policy Learning
Siddhant Haldar, Zhuoran Peng, Lerrel Pinto NeurIPS, 2024 poster project page / arXiv A simple transformer architecture that enables efficient learning of multi-task robot policies. |

|
OPEN TEACH: A Versatile Teleoperation System for Robotic Manipulation
Aadhithya Iyer, Zhuoran Peng, Yinlong Dai, Irmark Guzey, Siddhant Haldar, Soumith Chintala, Lerrel Pinto CoRL, 2024 poster project page / arXiv Open-sourced vision-based robot teleoperation system for multi-fingered dexterity and bimanual manipulation, currently supporting Franka, xArm, Jaco, Stretch, and Allegro platforms |
|
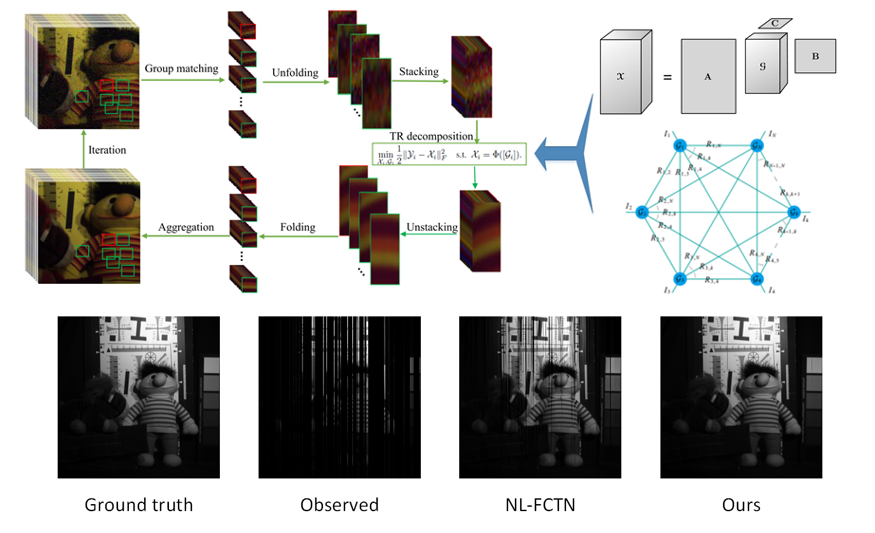
Hyperspectral Image Recovery Constrained by Multi‑Granularity Non‑Local Self‑Similarity Priors
Zhuoran Peng, Yiqing Shen Under Review, 2025 project page / arXiv Use the Multi‑Granularity Non‑Local Self‑Similarity (MG‑NSS) prior for hyperspectral image (HSI) recovery, unifying coarse‑grained Tucker and fine‑grained FCTN decompositions to jointly capture global, local and non‑local cues |
|
This is another Jon Barron's Template! |